
常用的排序算法
0 前言
本文代码部分主要基于C++语言,因为我平时用C#比较多,所以也增加了部分C#知识点。
1 稳定性
排序算法的稳定性指的是:对于两个相等的数据,它们的先后顺序在排序结束后依旧保持原样。
2 插入排序 insertionSort
2.1 描述
它的工作原理很像我们平时打扑克牌时整理手牌的过程:每摸到一张新牌,都会将其插入到左手已经排好序的牌堆中,直至所有的牌都在手里排列整齐。
1 | std::array<int,3> temp = {2,3,1}; |
2.2 实现
1 |
|
2.3 评价
- 稳定
- 时间复杂度
- $1+2+3+…+(n-1)=\frac{n^2}{2}=O(n^2)$
- 空间复杂度
- $O(1)$
3 希尔排序 shellSort
3.1 描述
希尔排序也称“缩小增量排序”,是插入排序的一种更高效的改进版本,是第一批突破$O(n^2)$时间复杂度的排序算法之一。
它的核心思想是“远距离的插入排序”。传统的插入排序每次只能将元素移动 1 位。如果一个很小的数在数组末尾,它必须经过多次比较和移动才能到达开头。希尔排序通过引入增量(gap)的概念,让元素可以“跳跃式”地移动:
- 将整个序列按照一定的间隔(增量)分成若干子序列
- 对每个子序列进行插入排序
- 逐渐缩小增量,重复步骤
- 最后当增量为1时,对全体元素进行一次标准插入排序
增量(Gap)的概念:
希尔排序的关键在于增量序列。常用的增量定义是 $gap = \lfloor length/2 \rfloor$,每轮减半,直到 $gap = 1$。


3.2 实现
1 |
|
3.3 评价
- 不稳定
- 时间复杂度
- $O(n^{1.3…2})$(取决于增量选择)
- 空间复杂度
- $O(1)$
3.4 优化:不同的增量选择
希尔排序的效率几乎完全取决于增量序列(Gap Sequence)的选择。
希尔最初建议的序列($N/2, N/4, \dots, 1$)虽然简单,但在最坏情况下仍会退化到 $O(n^2)$。这是因为这种序列的项之间往往不是互质的,导致较小的增量可能在重复排序之前已经处理过的元素。
1 Hibbard 增量序列
- 公式:$2^k - 1$(如:1, 3, 7, 15, 31…)
- 最坏时间复杂度:$O(n^{1.5})$
- 特点:这个序列避免了希尔增量中“偶数位置元素在最后一步前从不交换”的问题。因为相邻项互质,它能比原始序列更早地让序列变得“基本有序”
2 Knuth 增量序列
- 公式:$\frac{1}{2}(3^k - 1)$(如:1, 4, 13, 40, 121…)
- 最坏时间复杂度:$O(n^{1.5})$
- 特点:这是计算机科学家 Donald Knuth 推荐的序列。在实际应用中,它在中小规模数据上的表现非常出色
3 Sedgewick 增量序列(目前已知最优之一)
- 公式:通过两个公式交替生成:
- $9 \cdot 4^i - 9 \cdot 2^i + 1$
- $4^i - 3 \cdot 2^i + 1$
- 序列值:1, 5, 19, 41, 109, 209…
- 最坏时间复杂度:$O(n^{1.3})$
- 特点:这是目前最常用的高性能序列之一。实验证明,在 $n$ 达到数万时,它的性能表现优于以上所有序
如何在代码里应用?以Knuth序列为例:
1 | void shellSortKnuth(std::vector<int>& arr) { |
4 冒泡排序 bubbleSort
4.1 描述
冒泡排序通过相邻元素的比较和交换,使较大的元素逐渐向后移动。
- 一次冒泡:从左到右比较相邻的两个元素。如果左边比右边大,就交换位置。
- 重复进行:每进行一轮冒泡,当前未排序部分中“最大”的元素就会被推到最后的位置。
4.2 实现
1 |
|
4.3 评价
- 稳定
- 时间复杂度
- $O(n^2)$
- 空间复杂度
- $O(1)$
5 快速排序 quickSort
5.1 描述
快速排序是冒泡排序的改进(本质上都是交换排序),但快速排序通过引入跳跃式交换和分治,彻底解决了冒泡排序的核心痛点。
怎么理解改进:
- 从相邻交换到跨度交换
- 冒泡排序只能相邻两个元素进行比较和交换,如果要让一个极小的数从数组末尾回到开头,它必须像“气泡”一样,一格一格地游过去。每一轮遍历只能确保一个元素到达正确位置
- 快速排序通过选择一个基准(pivot),一次性将所有比基准小的数交换到左边,右边留下比基准大的数,这种跨距离交换大大减少了总的交换次数
- 消除冗余比较
- 冒泡排序每一轮扫描都很盲目,即便某些区域已经局部有序,由于它缺少全局视角,仍然需要重复进行相邻比较
- 快速排序则利用了分治策略,一旦基准点确定,左右区域彻底隔离,左边的数永远不需要和右边的数再进行比较
快速排序的核心在于“分区”操作,它的逻辑如下:
- 挑选基准(pivot):从数组中选出一个元素作为基准
- 分区:重新排列数组,把比基准小的元素挪到它左边,比基准大的挪到它右边
- 递归:对基准左边和右边的子数组分别重复上述过程,直到子数组长度为 1 或 0

5.2 实现
1 |
|
5.3 评价
- 不稳定
- 举例:例如$5_a$ $5_b$ 1这个例子,以1为基准值,完成一次排序后变为:1 $5_b$ $5_a$
- 时间复杂度
- $O(nlogn)$
- 空间复杂度
- 原地排序,但递归有额外空间消耗
- $O(logn)$(快速排序的递归树像一棵平衡二叉树,深度为$log_2n$,如果选择基准不当导致最坏情况,二叉树会呈一条直线,空间复杂度退化到$O(n^2)$)
5.4 优化
主要目的是为了解决快排在面临近乎有序的数组时,性能退化到$O(n^2)$的问题(递归树长度增加)。
5.4.1 基准值选择优化
1 随机基准
1 | void selectPivotRandomly(vector<int>& nums,int low,int high){ |
2 三数取中法
1 | void selectMidOfThree(std::vector<int>& arr, int low, int high) { |
5.4.2 分区方法优化
我们上面使用的分区方法是单路划分,在数组中全是重复元素时会退化到$O(n^2)$。针对这一点,有两种常见分区方法可以使用,主要思路是通过某种手段保证每次左右分区的平衡。
1 双指针分区
它通过两个指针从区间的两端向中间靠拢,当左侧指针遇到比pivot大的元素,右侧指针遇到比pivot小的元素时,进行交换。关键点是即使遇到和pivot相等的元素也进行交换。
这样虽然交换次数增多了,但能够强制保证分区平衡,避免退化。
1 | int partition(vector<int>& nums, int low, int high) { |
2 三路划分
重复元素处理王者。
普通的划分(如单向或双指针)只能将数组分为“小于等于”和“大于”两部分,而三路划分能直接将数组切分为三个区间:小于基准值、等于基准值、大于基准值。
我们需要三个指针来维持这个结构:
lt(less than):指向“等于区”的第一个元素gt(greater than):指向“等于区”的最后一个元素i(iterator):当前扫描的元素
具体操作逻辑:
- 如果
nums[i] > pivot:将nums[i]与nums[lt]交换,i和lt同时向右移动一位。(注:此处以升序为例,若降序则逻辑反转) - 如果
nums[i] < pivot:将nums[i]与nums[gt]交换,gt向左移动一位,但i不动(因为从右边换过来的数还没检查过)。 - 如果
nums[i] == pivot:不需要交换,直接i++。
1 | void quickSort3Way(vector<int>& nums, int low, int high) { |
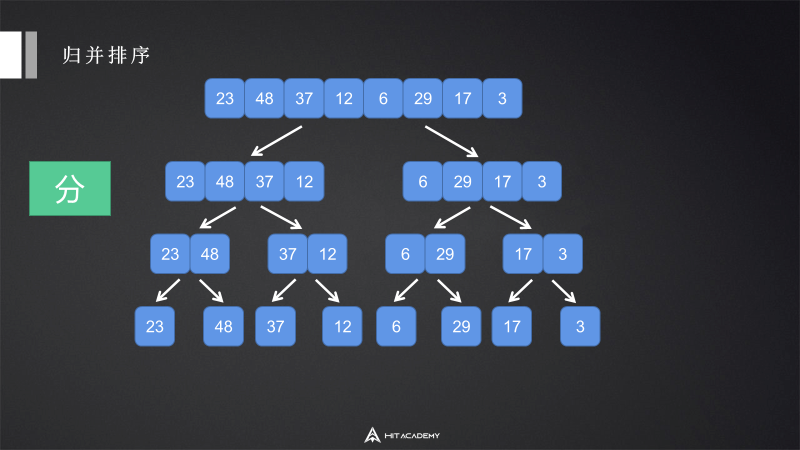
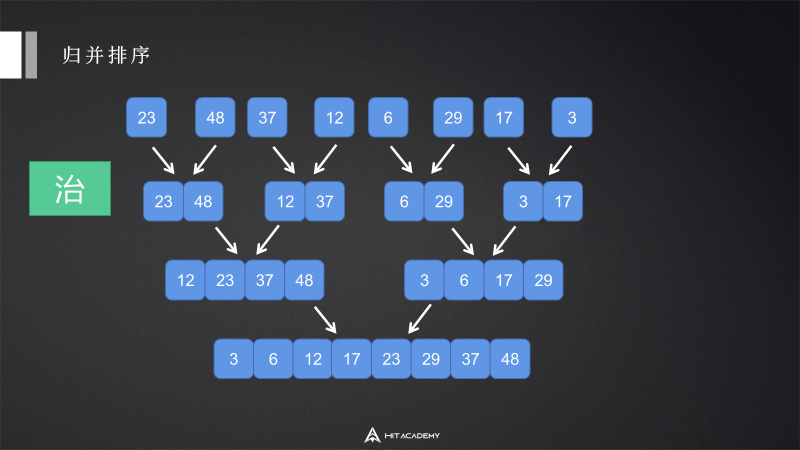
6 归并排序 mergeSort
6.1 描述
归并排序是一种基于分治的排序算法。
6.2 实现
1 |
|
6.3 评价
- 稳定
- 时间复杂度
- 始终为$O(nlogn)$
- 空间复杂度
- $O(n)$(需要一个和原数组一样大的辅助空间)
7 选择排序 selectSort
7.1 描述
核心思想是不断地从“未排序序列”中找最小或者最大的元素,放到“已排序序列”的末尾。
7.2 实现
1 |
|
7.3 评价
- 不稳定
- 例如$5_a$ $5_b$ 1,排序后变为 1 $5_b$ $5_a$
- 时间复杂度
- $O(n^2)$
- 空间复杂度
- $O(1)$
7.4 选择排序VS冒泡排序
一般选择排序更快一点,因为每一次排序里,冒泡排序每一对相邻元素不满足条件都要进行交换,交换频率很高,而选择排序只需要交换一次。
8 堆排序 heapSort
8.1 描述
堆排序是选择排序的极高效进化,在选择排序中,我们为了找最小值需要遍历整个数组($O(n)$),但堆排序利用了一种特殊的数据结构,将找最小值的时间缩短到了$O(logn)$。
堆对应一棵完全二叉树,且所有非叶结点的值均不大于(或不小于)其子女的值,根结点(堆顶元素)的值是最小(或最大)的,每次都取堆顶的元素,将其放在序列最后面,然后将剩余的元素重新调整为最小(大)堆,依次类推,最终得到排序的序列。
堆排序分为大顶堆和小顶堆排序。大顶堆:堆对应一棵完全二叉树,且所有非叶结点的值均不小于其子女的值,根结点(堆顶元素)的值是最大的。而小顶堆正好相反,小顶堆:堆对应一棵完全二叉树,且所有非叶结点的值均不大于其子女的值,根结点(堆顶元素)的值是最小的。
实现堆排序需解决两个问题:
- 如何将n个待排序的数建成堆?
- 输出堆顶元素后,怎样调整剩余n-1个元素,使其成为一个新堆?
首先讨论第二个问题:输出堆顶元素后,怎样对剩余n-1元素重新建成堆?
调整小顶堆的方法:
- 设有m 个元素的堆,输出堆顶元素后,剩下m-1 个元素。将堆底元素送入堆顶((最后一个元素与堆顶进行交换),堆被破坏,其原因仅是根结点不满足堆的性质。
- 将根结点与左、右子树中较小元素的进行交换。
- 若与左子树交换:如果左子树堆被破坏,即左子树的根结点不满足堆的性质,则重复方法 (2).
- 若与右子树交换,如果右子树堆被破坏,即右子树的根结点不满足堆的性质。则重复方法 (2).
- 继续对不满足堆性质的子树进行上述交换操作,直到叶子结点,堆被建成。
称这个自根结点到叶子结点的调整过程为筛选。如图:

再讨论第一个问题,如何将n 个待排序元素初始建堆?建堆方法:对初始序列建堆的过程,就是一个反复进行筛选的过程。
n 个结点的完全二叉树,则最后一个结点是第n/2个结点的子树。
筛选从第n/2个结点为根的子树开始,该子树成为堆。
- 之后向前依次对各结点为根的子树进行筛选,使之成为堆,直到根结点。
如图建堆初始过程:无序序列:(49,38,65,97,76,13,27,49)


8.2 实现
升序数组用大顶堆排序。
实现步骤:
- 建堆:将一个无序数组调整为大顶堆
- 交换:将堆顶元素(最大值)放置数组末端(从堆中去除),此时,最大值已经回到了它最终应该在的位置
- 重建堆:由于第二步交换将数组末端的数交换到了堆顶,破坏了原来的堆结构,因此我们需要对剩余部分进行堆重建
- 重复2/3,直至堆大小变为1
1 |
|
8.3 评价
- 不稳定
- 时间复杂度
- 始终为$O(nlogn)$,建堆是$O(n)$,n-1次调整是$O(nlogn)$
- 空间复杂度
- $O(1)$
9 常用排序方法比对表
| 算法名称 | 平均时间复杂度 | 最坏时间复杂度 | 空间复杂度 | 稳定性 |
|---|---|---|---|---|
| 插入排序 | $O(n^2)$ | $O(n^2)$ | $O(1)$ | 稳定 |
| 希尔排序 | $O(n^{1.3})$ | $O(n^2)$ | $O(1)$ | 不稳定 |
| 冒泡排序 | $O(n^2)$ | $O(n^2)$ | $O(1)$ | 稳定 |
| 选择排序 | $O(n^2)$ | $O(n^2)$ | $O(1)$ | 不稳定 |
| 快速排序 | $O(n \log n)$ | $O(n^2)$ | $O(\log n)$ | 不稳定 |
| 归并排序 | $O(n \log n)$ | $O(n \log n)$ | $O(n)$ | 稳定 |
| 堆排序 | $O(n \log n)$ | $O(n \log n)$ | $O(1)$ | 不稳定 |
| 内省排序 | $O(n \log n)$ | $O(n \log n)$ | $O(\log n)$ | 不稳定 |
10 C++里的排序工具
10.1 std::sort()
内省排序,不稳定,时间复杂度为$O(nlogn)$。它是一个“三位一体”的混合算法,旨在平衡快排的速度和堆排的稳定性。
底层
- 第一阶段:快速排序 (Quick Sort)
- 默认使用快排。为了避免 $O(n^2)$ 的最坏情况,它通常采用 “三数取中法”(取首、尾、中三个数的中位数作为基准)来平衡分区
- 第二阶段:堆排序 (Heap Sort) 作为保底
- 这是 sort 聪明的地方。它会维护一个递归深度计数器。如果递归层数超过了 $\log N$ 的某个倍数,它认为当前的快排分区效率太低(可能退化),于是立刻切换到 堆排序。因为堆排序在最坏情况下也能保证 $O(n \log n)$
- 第三阶段:插入排序 (Insertion Sort) 收尾
- 当分区缩小到一定阈值(通常是 16 个元素以内)时,算法停止递归,转而使用 插入排序。因为在小规模数据下,插入排序没有递归开销且缓存友好,速度反而是最快的
使用
1 | vector<int> v = {3, 1, 4, 1, 5, 9}; |
10.2 std::stable_sort()
归并排序的变体,稳定,时间复杂度为$O(nlogn)$。
底层
主算法
- 归并排序,它会尝试申请一块和原数组一样大的辅助空间进行归并
自适应策略
内存充足:执行标准的 $O(nlog n)$ 归并
内存不足:如果系统无法分配辅助空间,它会退而求其次,改用一种复杂的、在原地进行的归并算法,虽然不需要额外空间,但时间复杂度会退化到 $O(nlog^2 n)$
优化
- 在子区间很小时,它同样会切换到插入排序来提升性能
10.3 只要前K名:std::partial_sort
底层使用堆排序,不稳定,时间复杂度为$O(nlogk)$。它会将前 $k$ 个最小元素排好序放在数组开头,剩下的元素乱序留在后面。
底层
- 取原数组的前K个元素,建立一个大顶堆
- 遍历剩余的n-K个元素
- 如果当前元素比堆顶(当前最大的元素)小,替换堆顶,执行adjustHeap
- 遍历结束后,数组的前K个位置存放的就是最小的K个数(但目前在大顶堆里是乱序的)
- 对前K个数执行堆排序的后半部分(不断交换并adjustHeap)
1 | // 把前 3 小的元素排在最前面 |
10.4 只要第K个元素:std::nth_element
基于快速排序,不稳定,平均时间复杂度为$O(n)$。它不关心前 $k$ 个是否有序,只保证第 $n$ 位置上的元素是正确的,且左边的都比它小,右边的都比它大。
底层
使用某种快排的改进算法
区别:
快排在分区后,会对左右两个子区间都进行递归
快速选择在分区后,会检查第 $n$ 个位置在哪个区间里。它只对包含第 $n$ 个位置的那一个子区间进行递归,另一个区间直接丢弃
1 | // 运行后,v[k] 位置上的就是整个数组第 k 小的数 |
10.5 基于vector建堆
1 | make_heap(v.begin(), v.end()); // 把 vector 变成堆 |
10.6 自定义比较逻辑
需要注意,比较逻辑必须严格遵循a==b时返回false。
10.6.1 使用Lambda表达式
1 |
|
10.6.2 greater实现简单降序
1 |
|
11 C#里的排序工具
11.1 Array.Sort()和List\.Sort()
底层实现和C++里的sort一致。
11.2 Enumerable.OrderBy(LINQ)
稳定,底层通常采用一种快速排序的变体或归并排序的实现,以保证排序算法的稳定性。
1 | using System.Linq; |
11.2 自定义比较逻辑
11.2.1 Lambda表达式
1 | List<int> list = new List<int> { 1, 4, 2, 8, 5 }; |
为什么a.CompareTo(b)是升序?
实际上是a-b,如果a小于b,则返回负数。
而sort方法实际上是接收一个整数,负数时,第一个参数在左边,正数时,第二个参数在左边。
因此当a小于b时,a-b<0,结果为负数,a排在左边,为升序。
11.2.2 Enumerable.OrderBy(LINQ)
稳定,底层是快排变体或归并排序,以保证相同元素的顺序。
1 | using System.Linq; |
11.2.3 实现IComparer\
实现 IComparer\
1 | public class IntDescendingComparer : IComparer<int> |
1 | List<int> numbers = new List<int> { 1, 5, 3, 9, 2 }; |
11.2.4 Span\.Sort()
现代 .NET(.NET Core 2.1+ 及 .NET 5/6/7/8+)中性能最顶级的排序手段。它之所以被称为“黑科技”,是因为它在保持高性能的同时,实现了对内存的绝对掌控。
优势
- 零分配:它直接在内存块上操作。无论数据是在堆上、栈上、还是非托管内存中,它都不需要创建多余的对象。
- 泛型特化:针对基本类型(如
int,double),它在底层有特殊的实现,能够极大地利用 CPU 指令集优化。 - 内存安全:它提供了指针级别的速度,但受到运行时边界检查的保护,不会像 C++ 裸指针那样容易导致崩溃。
1 | int[] arr = { 5, 2, 8, 1, 9 }; |
Span\
1 | // 定义一个结构体比较器 |
11.2.5* C#里Lambda性能
在 C# 中,Lambda 表达式不仅仅是“简写的函数”,它在底层涉及到了委托、闭包和即时编译(JIT)优化。
理解 Lambda 的性能,需要将其拆解为三个层面:调用开销、内存分配(GC 压力)和编译器黑魔法。
1 调用开销:委托
当你将 Lambda 传给 List\
- 委托调用:在底层,委托调用比直接调用方法(或 C++ 的内联 Lambda)慢一些。因为委托是一个对象,调用它需要通过一次间接寻址
- 无法内联:在 C++ 中,
std::sort会在编译时把 Lambda 逻辑直接嵌入。但在 C# 中,JIT 编译器通常很难跨委托进行内联优化。这意味着每比较一次,都要产生一次方法调用的成本
2 内存分配:闭包的陷阱
这是影响 C# Lambda 性能最关键的因素。Lambda 是否“捕获”了外部变量,性能天差地别。
无变量捕获
如果你写的 Lambda 只依赖参数:
1 | list.Sort((a, b) => b.CompareTo(a)); |
C# 编译器非常聪明。它会生成一个静态字段来缓存这个委托实例。这意味着除了第一次,后续调用完全零内存分配。
捕获外部变量(闭包)
如果你在 Lambda 里用到了外部的变量:
1 | int offset = 10; |
此时,编译器必须创建一个隐藏的类(DisplayClass),把 offset放进去,并在堆上实例化这个类。后果:每次调用这段代码,都会在堆上产生一个新的对象。在海量数据排序或高频循环中,这会产生大量的 GC压力,导致程序卡顿。
3 性能杀手:LINQ 中的 Lambda
虽然 list.OrderBy(x => x) 写起来很爽,但它的性能通常比 list.Sort() 慢 5-10 倍。
- 包装层数多:LINQ 内部会有多次迭代器转换
- 装箱:如果处理的是值类型(如 int、struct),LINQ 有时会发生装箱操作,极大损耗 CPU
- 通用性代价:LINQ 为了支持各种数据源,放弃了针对特定结构的底层优化
4 极端优化:如何跑得跟 C++ 一样快?
如果你在写游戏引擎或高性能组件,觉得 Lambda 慢,有几种进阶方案:
- 方案 A:使用 struct 实现 IComparer\
- 在 C# 中,如果 Sort 接收一个 struct 类型的比较器,JIT 往往能进行泛型特化,从而实现类似 C++ 的内联,消除调用开销
- 方案 B:Span
.Sort - 在 .NET Core 及后续版本中,使用 Span\
- 在 .NET Core 及后续版本中,使用 Span\
5 性能排名
| 排名 | 方法 | 性能特点 |
|---|---|---|
| 1 (最快) | Span<T>.Sort 或 Array.Sort |
接近硬件极限,零分配。 |
| 2 | List<T>.Sort (不捕获变量) |
只有委托调用开销,无 GC 压力。 |
| 3 | List<T>.Sort (捕获变量) |
有 GC 压力,高频调用需警惕。 |
| 4 (最慢) | LINQ OrderBy |
开发快,运行慢,内存占用高。 |
12 练习
215 数组中第K个最大元素
堆排序
1 |
|
快排
要避免快排因为退化到$O(n^2)$过不了,所以用了三路划分。
1 |
|